製品情報
3D安全センサー
AcroSensor(アクロセンサー)
AcroSensorとは
ミリ波レーダー式の3D安全センサー
人との距離/速度を3D検出、手先検出が可能
協働ロボットの生産性を向上させる(安全性と生産性の両立を実現)

【産業用ミリ波レーダー】
協働ロボットのチョコ停を減らして生産性向上させる安全センサー

協働ロボットを検討しているが、ロボットが遅く、導入をためらっている。
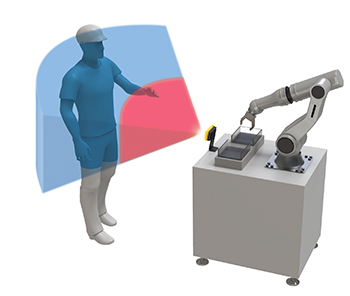
人が離れている時は、協働モードを解除し高速動作させることができます
協働ロボットは人が「接近した時」、低速の協働モードで動かす必要がありますが、離れている時は、協働モードを解除し、高速で動かすことができる協働ロボットもあります。
人の「接近」を検出するセンサーは、世の中に多く存在しますが、「手先を検出できる」3Dセンサーは、今まで存在しませんでした。
「人が手を近づけた時だけ低速の協働モード」で安全を担保しつつ、人が離れている時は高速で動作させ生産性を上げる、そんな夢のような生産環境を実現できます。
安全を担保しようとすると、広いスペースを確保する必要がある。
占有面積を削減することで、省スペース化できます
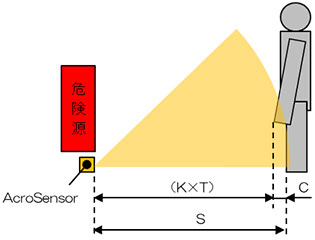
協働ロボットの稼働エリアに、侵入センサーが取り付けられている場合、停止エリア(停止領域)はISO13855にて、安全距離として計算式が規定されています。
S =( K × T )+ C
S:安全距離
K:人の接近速度
T:機械が停止するまでの時間
C:検出する前に人が侵入する距離
※850mmは、腕の長さとして規定。
国際的に大柄の男性を考慮して規定。
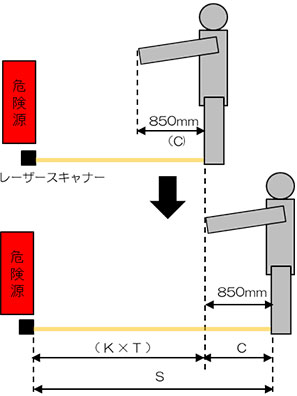
このCが長いほど、センサーの検出エリアが広くなります。
したがって誤って人が侵入する確率が高くなりロボットのチョコ停が増えることになります。
ミリ波を使用したAcroSensor は、
人を距離、または距離と移動速度で3Dで検出できます。
手先の検出が可能です(世界初!)
安全と生産性を両立できるセンサーです。
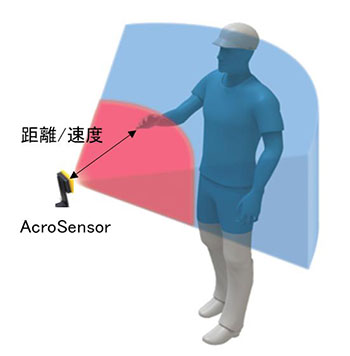
3Dで手先を検出し、
C(検出する前に人が侵入する距離)を最小化することで、
短縮できます。
レーザースキャナーと、Cを短縮した 3Dセンサーのセンシングエリアを比べてみます。
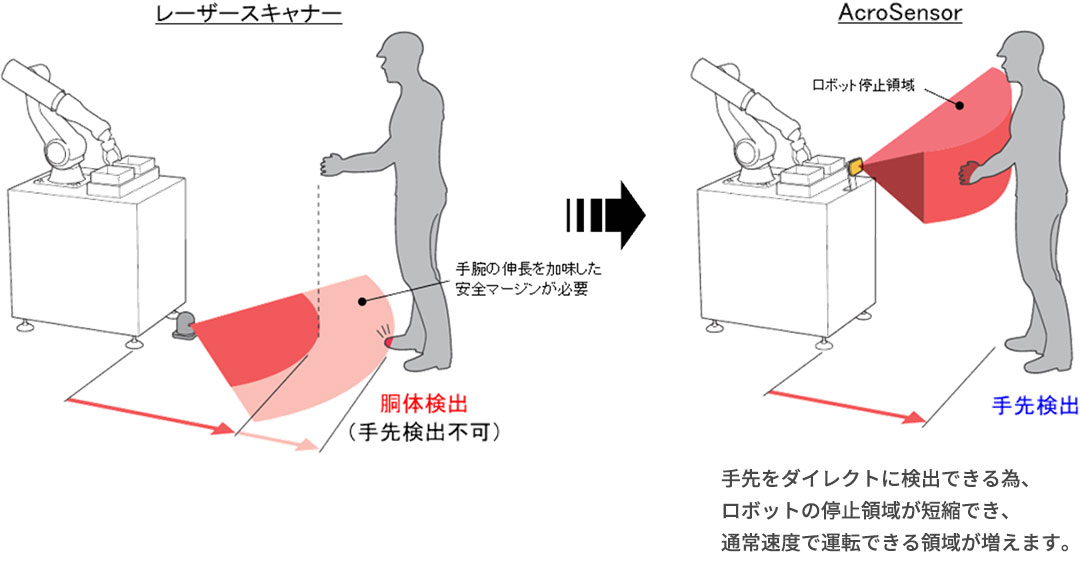
粉塵、ミスト、外乱光の影響でレーザーセンサーが誤動作し、ロボットがよく止まる。
耐環境性に優れ、安定した検出ができます。
電波を使用したセンサーは、「粉塵、ミスト、外乱光」に強いのが特徴です。